
HARDWARE

The custom Oculus sonar is built into the body of the FUSION vehicle to provide a tightly integrated design. Located high on the vehicle with a 10 degree down angle the sonar captures short to long range imagery including vehicle mounted options like the grabber.
There are different frequency versions of the Oculus available for the FUSION with the standard being the M750d dual frequency 750kHz and 1.2MHz that offers a great balance between range and resolution. Where range is less important than resolution two higher frequency versions are available including the M1200d (1.2/2.1MHz) and the M3000d (1.2/3MHz).
Angles and ranges of the sonars vary:
M750d (standard fitted)
- Range (low freq): ~120m (394ft)
- Range (high freq): ~40m (131ft)
- Horizontal field of view (both freq): 130 degrees
- Vertical field of view (both freq): 20 degrees
M1200d (optional)
- Range (low freq): ~40m (131ft)
- Range (high freq): ~10m (33ft)
- Horizontal field of view (low freq): 130 degrees
- Horizontal field of view (high freq): 60 degrees
- Vertical field of view (low freq): 20 degrees
- Vertical field of view (high freq): 12 degrees
M3000d (optional)
- Range (low freq): ~30m (98ft)
- Range (high freq): ~5m (16ft)
- Horizontal field of view (low freq): 130 degrees
- Horizontal field of view (high freq): 40 degrees
- Vertical field of view (both freq): 20 degrees
SOFTWARE CONTROLS & SETTINGS
The hardware is often only as good as the software and the FUSION UI takes the hardware to another level. Within the FUSION user interface are a variety of familiar controls, tools and settings.
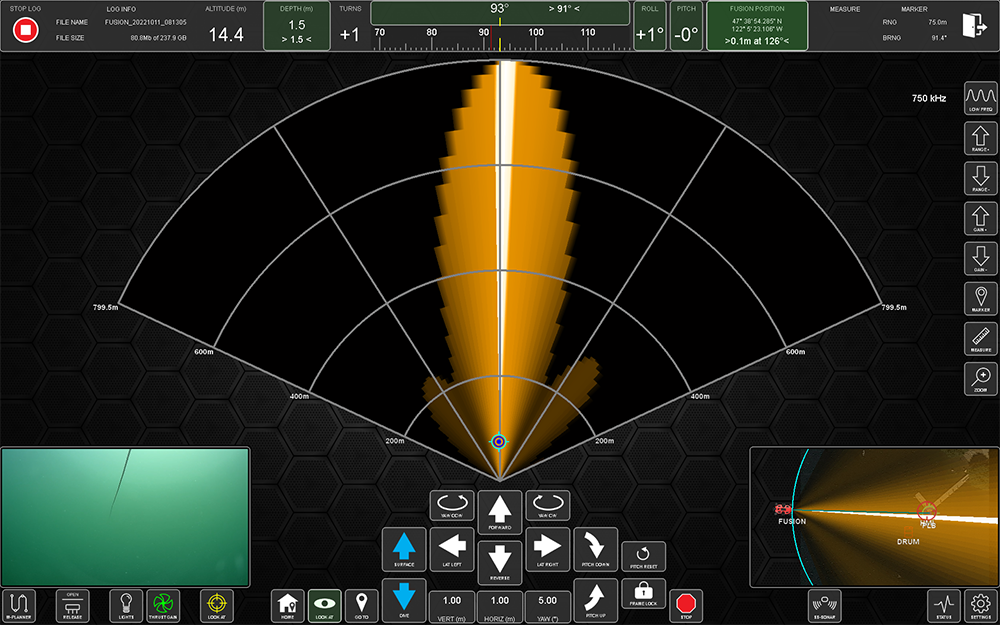
When the FLS is dominant in the user interface the operator has controls including:
- Range - used to increase or decrease sonar range.
- Gain - used to increase or decrease sonar gain.
- Frequency - used to switch between high and low frequency.
- Measure - used to measure in the sonar window.
- Marker - used to place a marker on an object in the sonar window. Creates a marker with optional operator defined parameters as well as place marker in nav screen.
- Zoom - used to zoom in to greater detail.
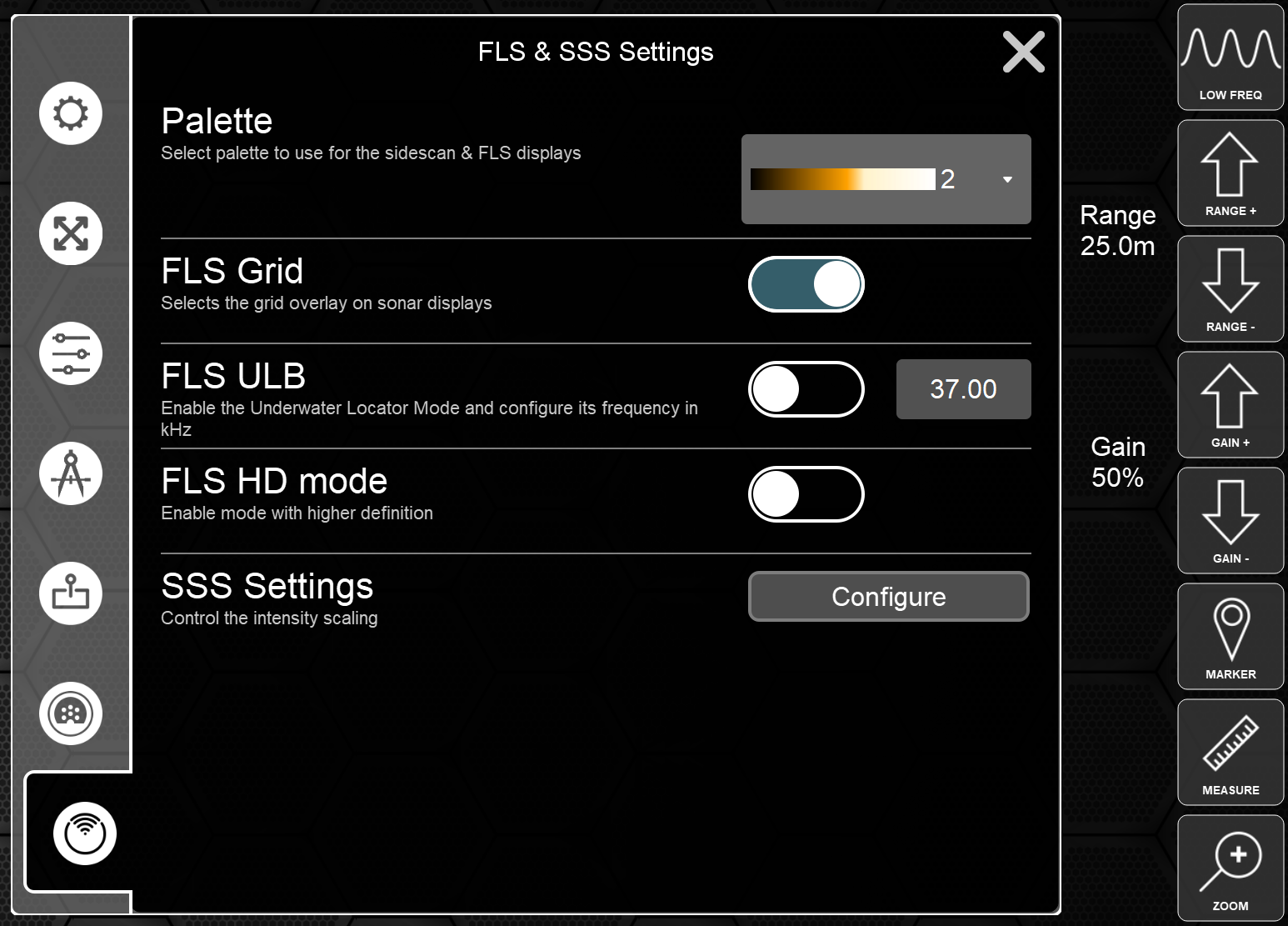
There are additional settings found in the operator settings menu including:
- Palette - choose from a variety of color palettes.
- FLS Grid - turn the range grid on or off.
- FLS ULB - place the FLS into underwater locator beacon mode. See below for more information.
- FLS HD Mode - increase sonar definition.
VISUALIZATION
Beyond the traditional controls of the FLS are various helpful methods of visualization. Operators can choose from a number of different real time and post processing FLS display functions including:
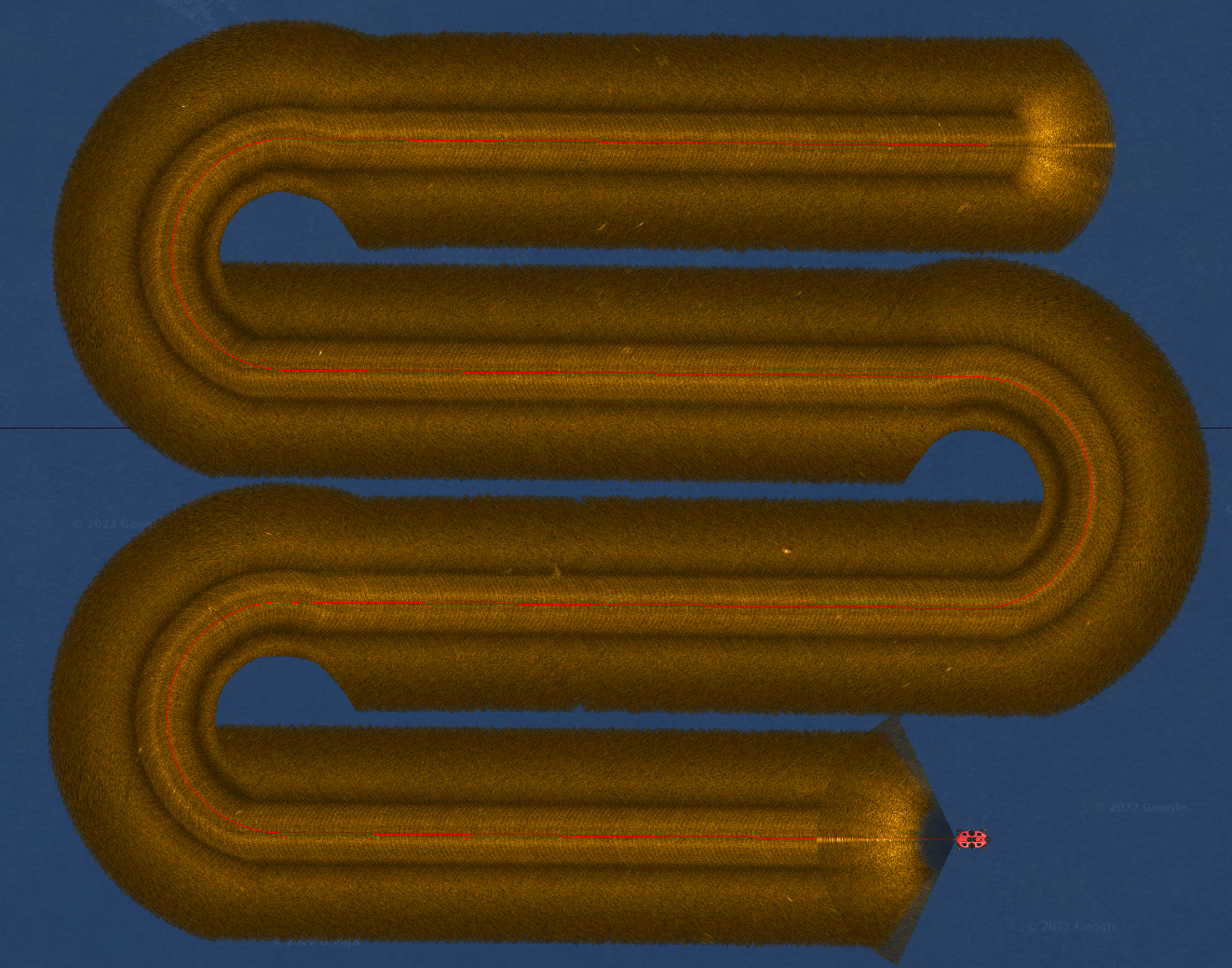
- Live FLS Overlay - with this layer on the FLS sonar is visible in the navigation window with real time update and overlay on imagery. Particularly helpful in referencing FLS data on satellite imagery when operating around infrastructure.
- FLS Mosaic - operators can enable the mosaic layer, which creates in real time a FLS mosaic on the navigation screen. Useful for mapping coverage areas and building exportable imagery.
- GAP Fill - the FLS mosaic is useful for gap filling the Nadir region of side scan data to ensure complete coverage as well as eliminating the need for larger overlapping transects.
The above functions are available in both real time operations as well as data file replay.
UNDERWATER LOCATOR BEACON
The FUSION equipped with the M750d sonar can be used as an underwater beacon locator. By enabling the ULB in the settings menu the sonar detects user selectable frequencies at ranges out to approximately 500 meters (1,650ft). The FUSION software automates the process by conducting a series of maneuvers to triangulate the beacon location and provide a go to Marker for automated navigation.
