
COMPLEX MISSION DESIGN
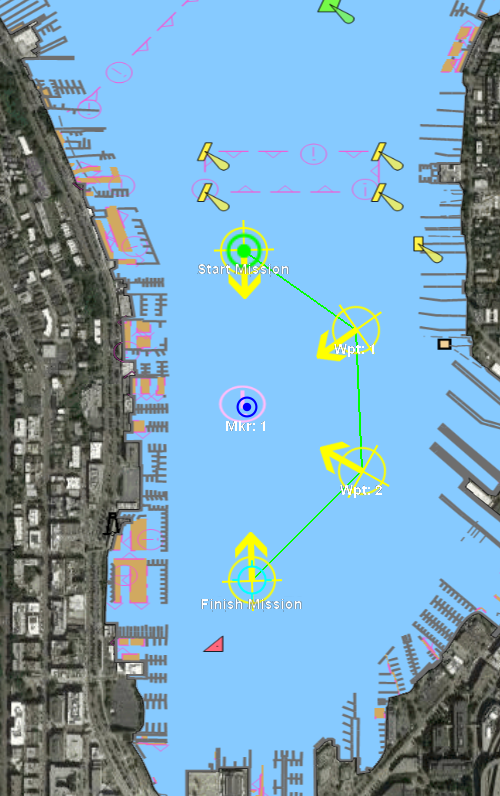
As a vectored vehicle the FUSION is not restricted simple grid pattern surveys. Missions can be planned with more complex designs of which the choices are almost infinite. Utilizing the FUSION's 5 degrees of control mission designs can include:
- Point to point navigation while looking to next point
- Point to point navigation while looking at a specified heading or marker
- Change altitude/depth in motion or at specified waypoint
- Orbit (look at) specified waypoint
- Pitch up/down
- Vary velocity
- Release payload
The highly intuitive mission planner allows operators to easily and efficiently design missions. Visit the User Interface section to learn more about mission planning.
DATA COLLECTION AND REPLAY
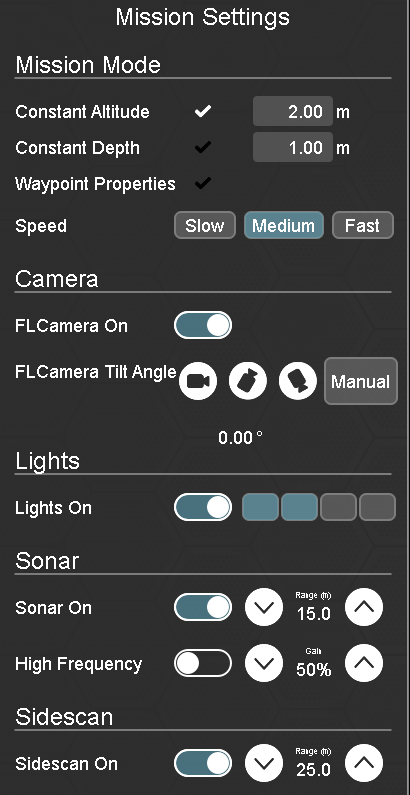
During missions FUSION can be programmed to collect various data including forward looking sonar, side scan sonar and video. An intuitive panel allows operators to select the desired data to be collected. All data is stored on the internal drive in FUSION and once FUSION has completed the mission the same user interface allows for easy download. With the data downloaded it is easy to replay and analyze in the user interface.
After analyzing the data including creation of sonar mosaics the data can easily be outputted in various formats including KMZ and GeoTIFF. Additionally, objects of interest can be marked and either pushed to the FUSION in ROV mode for real time investigation or outputted in the automated report generator.
Visit the User Interface section to learn more about data replay, exporting and reporting.
