
HOW IS THE FUSION USED IN SAR?
Poor visibility in rivers, lakes, and oceans makes underwater searches hazardous and time-consuming for professional Search and Recovery divers. The SRS FUSION Hybrid vehicle reduces the risks for SAR personnel and streamlines the search and recovery process while minimizing their exposure to dangerous conditions.
TARGET LOCATION
With its standard integrated suite of sensors, the FUSION simplifies the process of locating both small and large targets during search and recovery missions, surpassing many other ROVs. Our custom software seamlessly combines these sensors to enhance these critical operations’ speed, efficiency, and safety.
SEVERED TETHER ASSURANCE
In extreme conditions, when the FUSION is configured as an ROV, the tether can be severed during normal operations, and there is potential for the vehicle to be lost. The FUSION is equipped with an advanced USBL subsystem with an integrated acoustic modem, allowing AUV control commands to be communicated to the vehicle. The advanced system hybrid functionality possessed by FUSION mitigates the non-hybrid ROV vehicle loss scenarios when the tether is cut.
BRINGING CLOSURE TO FAMILIES

Search and Recovery missions can be incredibly challenging for families, making it crucial to expedite the process. Relying on a dependable ROV such as the FUSION empowers SAR teams to operate with maximum efficiency, ultimately delivering closure to families swiftly.
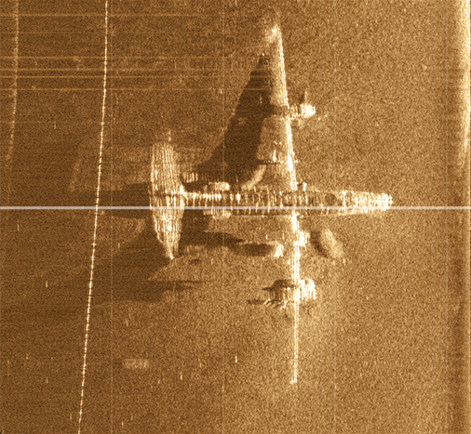
BODY RECOVERY
With the integrated Blueprint Subsea Oculus Imaging Sonar and the optional side scan sonar, locating drowning victims in vast water bodies can be achieved at a faster pace compared to traditional diver search methods, effectively reducing the duration of the body recovery operation.
EVIDENCE RECOVERY
Evidence can be disposed of in large bodies of water intentionally and inadvertently, and the FUSION fills a critical role in obtaining forensic evidence. The list of items that are considered evidence can range from weapons to human remains, art, currency, and vehicles of various types, among other things. The sensors on FUSION ROV are complimentary and provide alternative imaging strategies to meet operational realities.
FAST SURVEYS WITH GAP FILLER TECHNOLOGY
Our innovative Nadir gap filler technology can be harnessed to support shorter Search and Recovery times to expedite side scan survey operations. The FUSION stands out as the sole ROV globally equipped with this cutting-edge feature, making it the perfect choice for swift surveys of expansive water bodies.
BATTERY POWERED FOR DEPLOYMENT ANYWHERE
The FUSION operates on rechargeable lithium-ion batteries, providing a more flexible deployment option compared to traditional tether-powered methods. This allows for easier transportation and eliminates the need for a generator or surface power, making checking the system into extra hold luggage (excluding the batteries) convenient.
